ubuntu20.04(xsens)imu的ros包下载和使用
...大约 2 分钟
ubuntu20.04(xsens)imu的ros包下载和使用
MT软件套下载
下载连接:https://www.movella.com/support/software-documentation
在MTi产品下,点击Linux的MT软件套件,然后会提示你填写信息

填写信息后,下载x64的MT软件套件
执行.sh脚本
解压刚刚下载的压缩包
打开解压后的文件夹
执行mtsdk _xxxx.sh脚本(版本可能不同)
打开终端输入
sudo ./mtsdk
按下Tab键会自动补全,回车执行

可能出现以上报错,解决办法
执行:
sudo apt-get update
sudo apt-get install sharutils
再次执行
sudo ./mtsdk
按下Tab键会自动补全,回车执行,中途按下回车确认位置即可

找到
/usr/local/xsens
下的xsens_ros_mti_driver
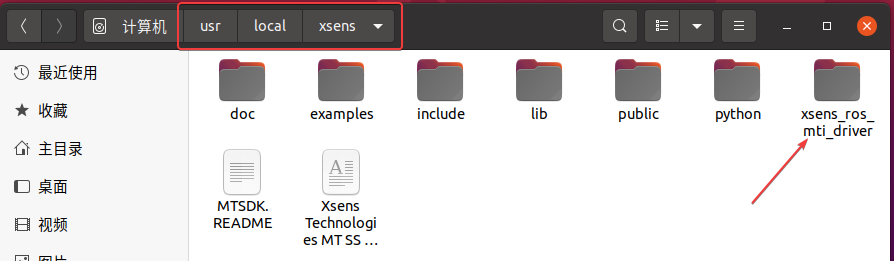
ros包
复制该包,新建工作空间,将该包放入工作空间的src目录下
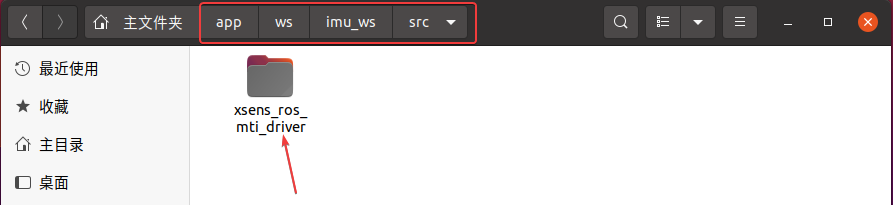
cd /usr/local/xsens
mkdir -p /home/li/app/ws/imu_ws/src/
cp -r xsens_ros_mti_driver/ ~/app/ws/imu_ws/src/
在终端打开工作空间目录,编译lib/xspublic目录下的源代码。
cd ~/app/ws/imu_ws
pushd src/xsens_ros_mti_driver/lib/xspublic && make && popd
catkin_make
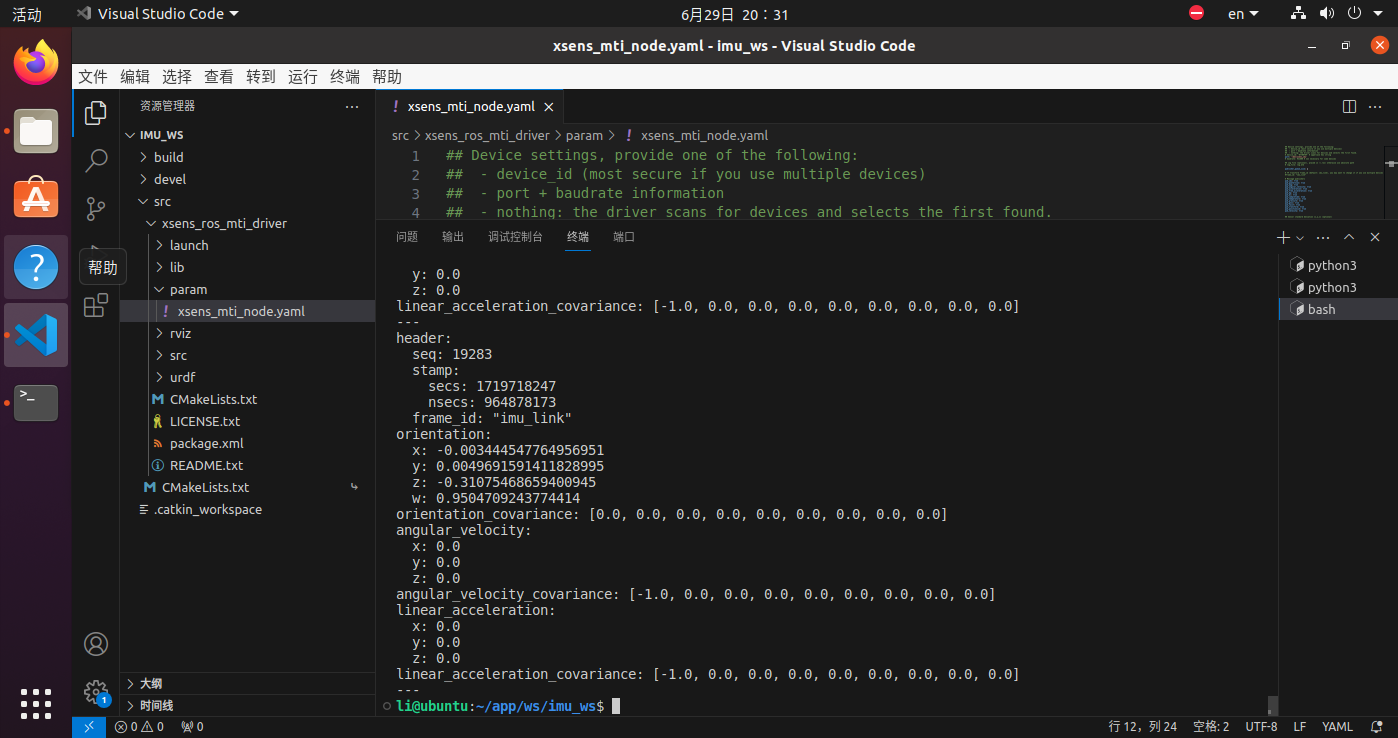
运行launch文件IMU节点数据
连接设备如果只有一个usb设备,直接找到yaml文件解开此处的注释即可
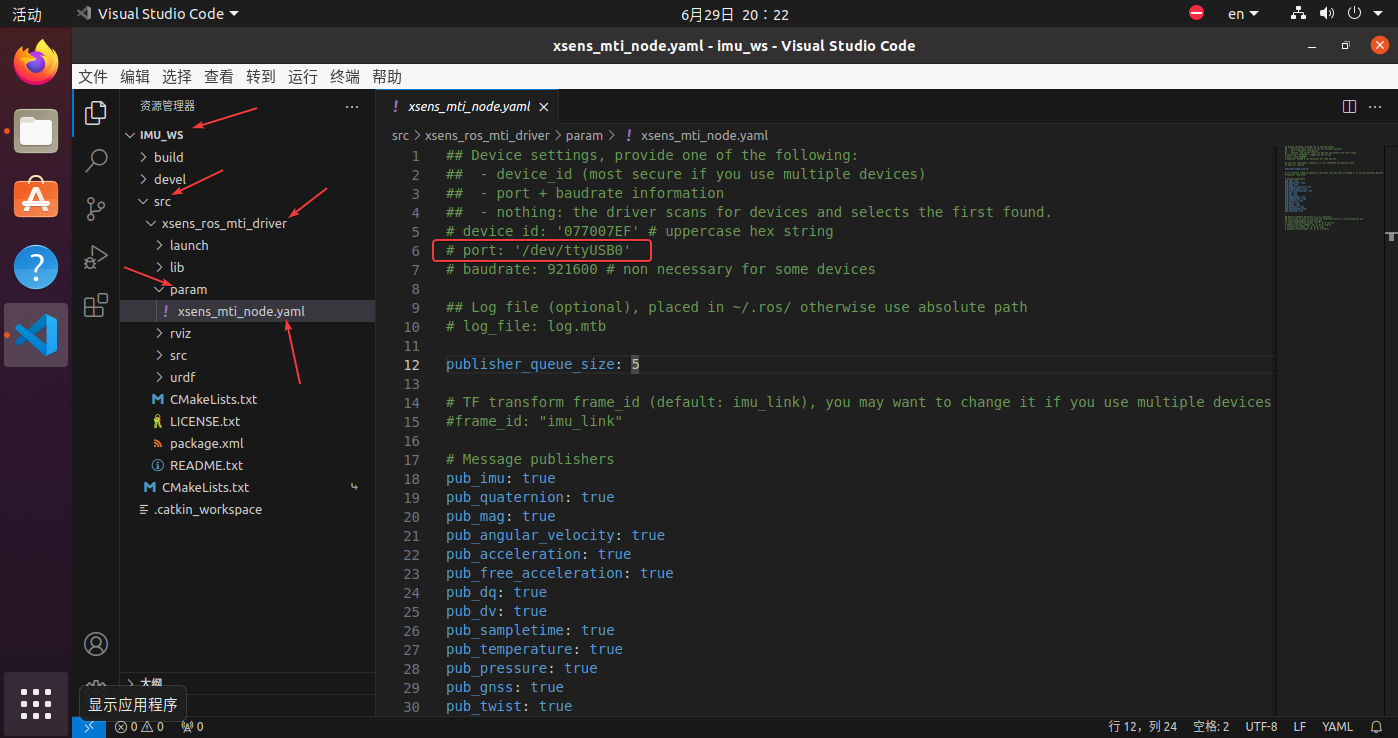
如果有多个则需要,设置别名(点击查看教程)
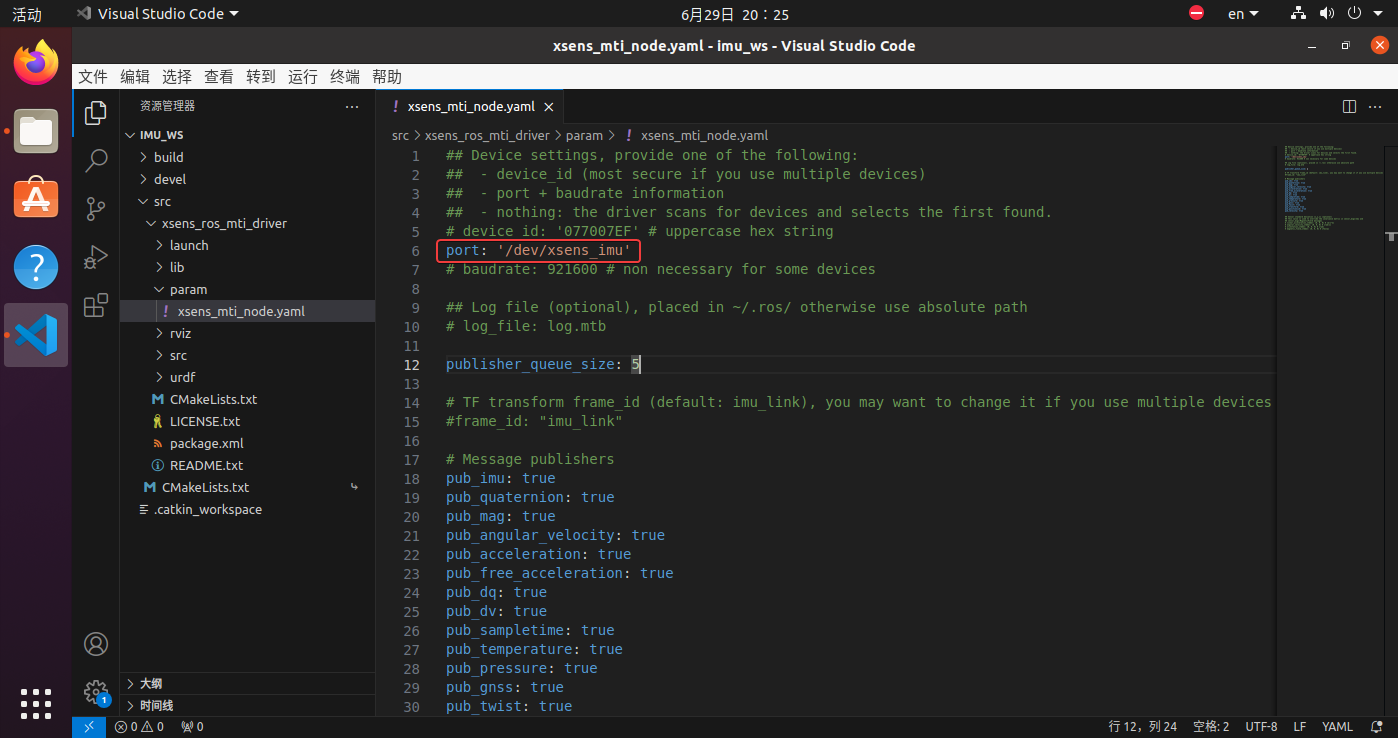
我这里设置成了xsens_imu


修改port为'/dev/xsens_imu'
打开终端启动ROS的核心组件
roscore
新建一个终端,打开工作空间目录
cd ~/app/ws/imu_ws
source devel/setup.bash
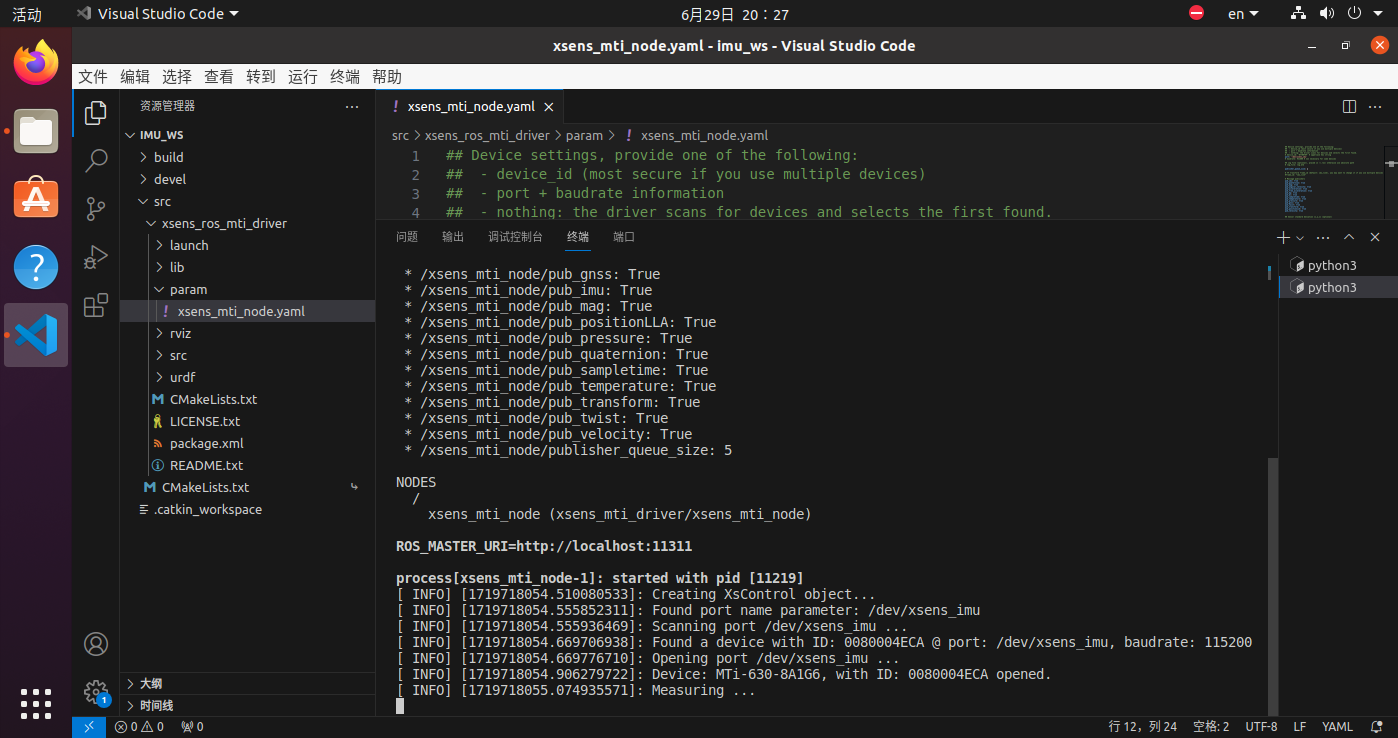
roslaunch xsens_mti_driver xsens_mti_node.launch
启动成功
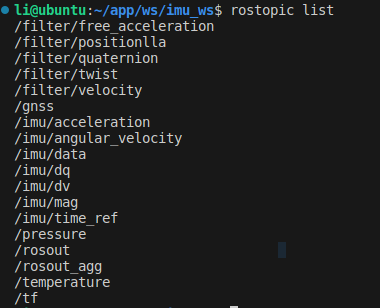
查看所有话题
rostopic list
查看数据
rostopic echo /imu/data