ros学习-设置权限和串口别名规则
...大约 2 分钟
ros学习-设置权限和串口别名规则
使用多个传感器时,根据传感器插入的顺序,对应的串口名会发生变化,每次都手动调整配置文件的话会比较麻烦。可以通过规则文件设置别名来解决这个问题,同时可以设置自动赋予全部权限规则
解决权限问题
接入传感器,查看设备信息
ls -l /dev/ttyUSB0

只有读写权限无执行权限
新建一个ttyUSB.sh脚本文件
touch ttyUSB.sh
打开该文件,写入以下内容,保存
echo 'KERNEL=="ttyUSB*", MODE:="0777", GROUP:="dialout"' >/etc/udev/rules.d/ttyUSB.rules
service udev reload
sleep 2
service udev restart
给脚本文件授权
sudo chmod 777 ttyUSB.sh
运行脚本
sudo sh ttyUSB.sh
重加载和重启使规则生效
sudo udevadm trigger
授权(将当前用户添加进dialout组):
sudo usermod -a -G dialout $USER
$USER为当前用户变量
再次查看设备信息

已经拥有执行权限
设置这个规则后,以后只要是ttyUSB设备,都会自动赋予777全部权限
设置串口别名
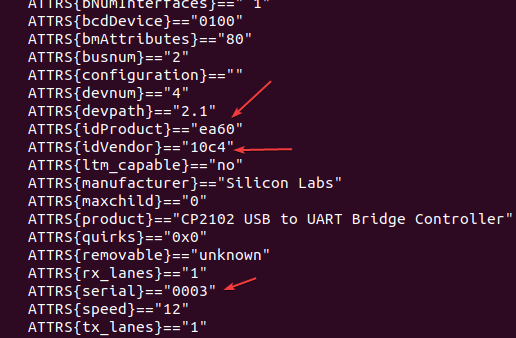
查看设备udev信息及属性
udevadm info --attribute-walk --name=/dev/ttyUSB0
找到这几个属性
新建一个wheeltec_udev.sh
touch wheeltec_udev.sh
编写wheeltec_udev.sh脚本
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", ATTRS{serial}=="0003", GROUP:="dialout", SYMLINK+="wheeltec_FDI_IMU_GNSS"' >/etc/udev/rules.d/wheeltec_fdi_imu_gnss.rules
service udev reload
sleep 2
service udev restart
KERNEL=="ttyUSB*": KERNEL是指设备的内核名称,ttyUSB*适用于所有以ttyUSB开头的设备,通常指的是通过USB连接的串行设备。 ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60": 精确匹配特定厂商和产品的设备 ATTRS{serial}=="0003": 设备序列号(serial)为0003 区分同一型号但具有不同序列号的多个设备。 GROUP:="dialout":设备文件的所属组为dialout。属于dialout组的用户都将有权访问此设备 SYMLINK+="wheeltec_FDI_IMU_GNSS":设置别名wheeltec_FDI_IMU_GNSS
给脚本文件授权
sudo chmod 777 wheeltec_udev.sh
运行脚本
sudo sh wheeltec_udev.sh
重加载和重启使规则生效
sudo udevadm trigger
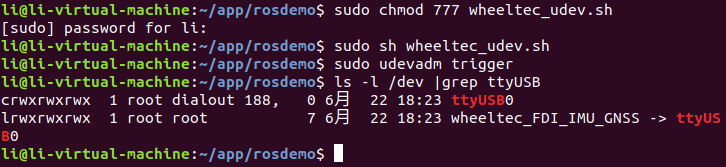
别名设置成功






